|
Hi, I am now a Research Assistant in Robotics (Learning-based Control) at Southern University of Science and Technology(SUSTech), advised by Prof. Hua CHEN and Prof. Wei ZHANG. I am also an incoming HKU ME PhD student for 2025, under the supervision of Prof. Fu ZHANG. My research interest lies in the intersection of Deep Reinforcement Learning and Robotics. Specifically, for example, I am interested in learning a whole-body control scheme to achieve loco-manipulation of a wheeled quadrupedal/bipedal manipulator. I obtained my B.E. in Automation from Harbin Institute of Technology, Shenzhen in Jun. 2024. I am also eager to venture into diverse fields, e.g. model-based RL, AMP & ASE, learning based perceptive loco-manipulation, Transformers' and Diffusions' application on bipeds/humanoid. |
|
|
|
|


|
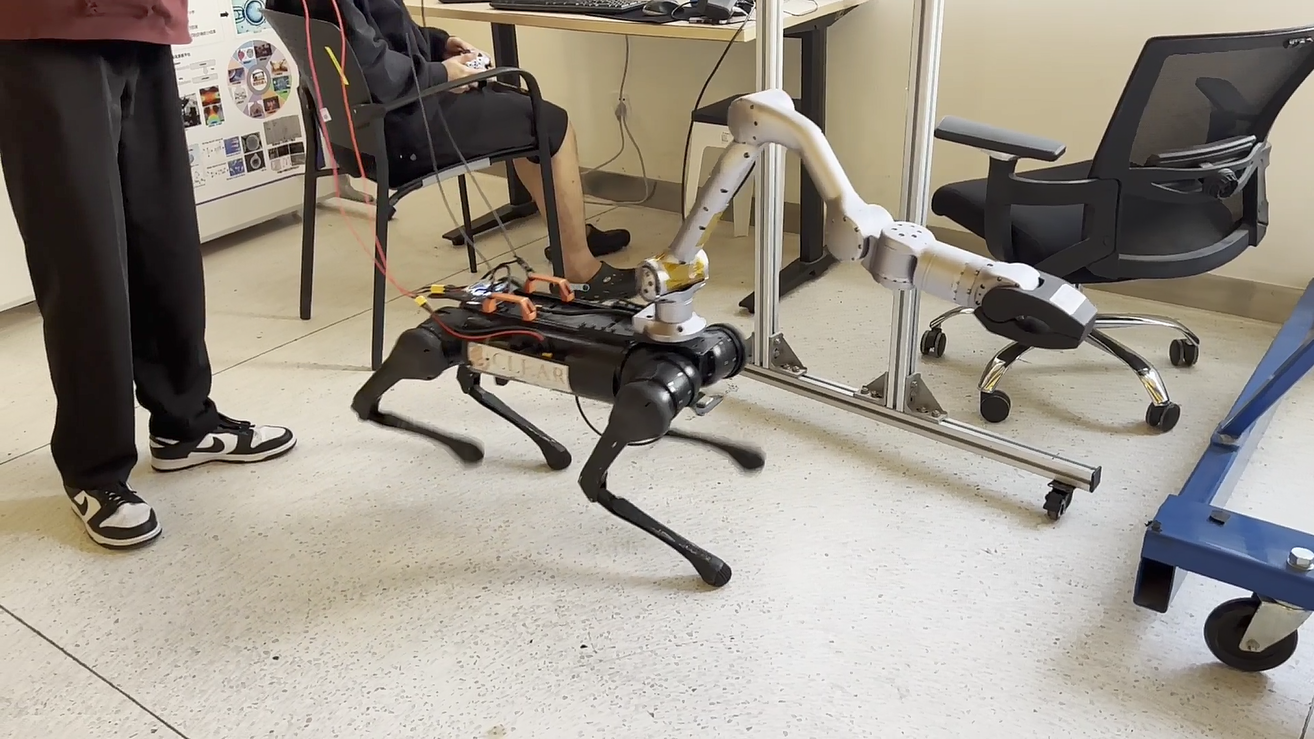
We develop a whole-body policy for loco-manipulation of wheeled quadrupedal manipulator, which can track a desired 6D pose of end-effector. This policy has several features: 1) it is omni-directional, 2) it is robust to external disturbances, 3) it is an end-to-end scheme that only requires the pose command from user, then the policy will automatically determine the movement of base as well as the manipulator to track the desired pose. 4) The real world experiments demonstrate smooth and precise tracking performance, achieving state-of-the- art tracking position error of less than 5 cm, and rotation error of less than 0.1 rad. |

|
Achieving smooth loco-manipulation task execution. The policy is trained to combine the locomotion and manipulation tasks, resulting in a smooth integration of locomotion and manipulation. |


|
Our policy is trained in parallel in Issac Gym with domain randomization and observation noise. We adopt the insight of Teacher-Student framwork and curriculum learning to train the policy. |
|
|
|
|
|
|
|
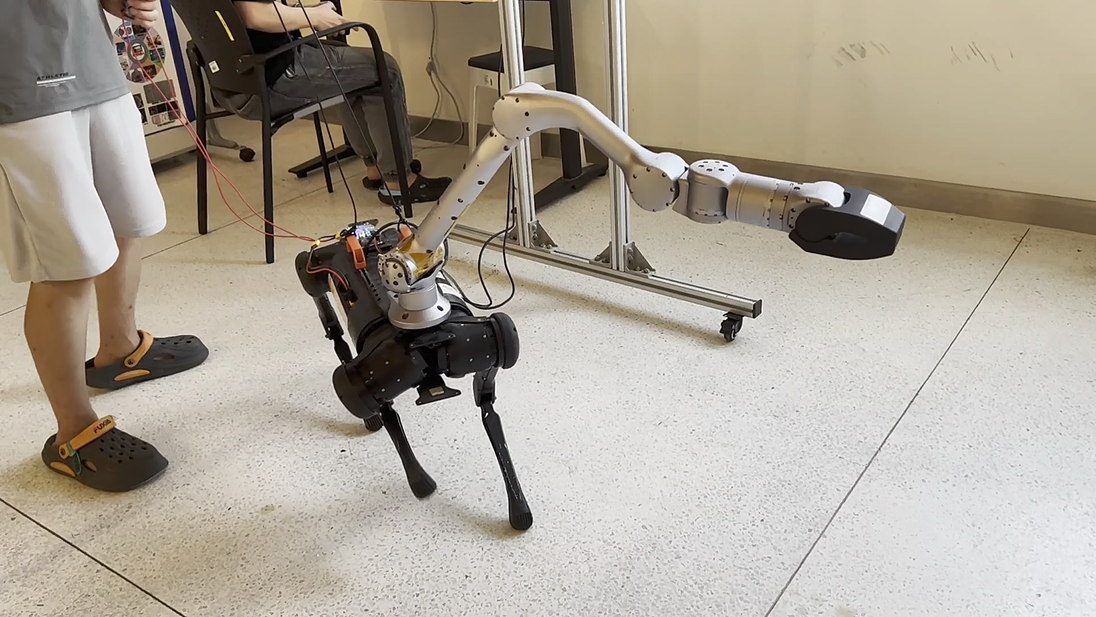
Using NMPC+WBC to achieve the X-axis chicken-head motion of the quadrupedal robot. |
|
Using NMPC+WBC to achieve the Yaw-axis chicken-head motion of the quadrupedal robot. |
|
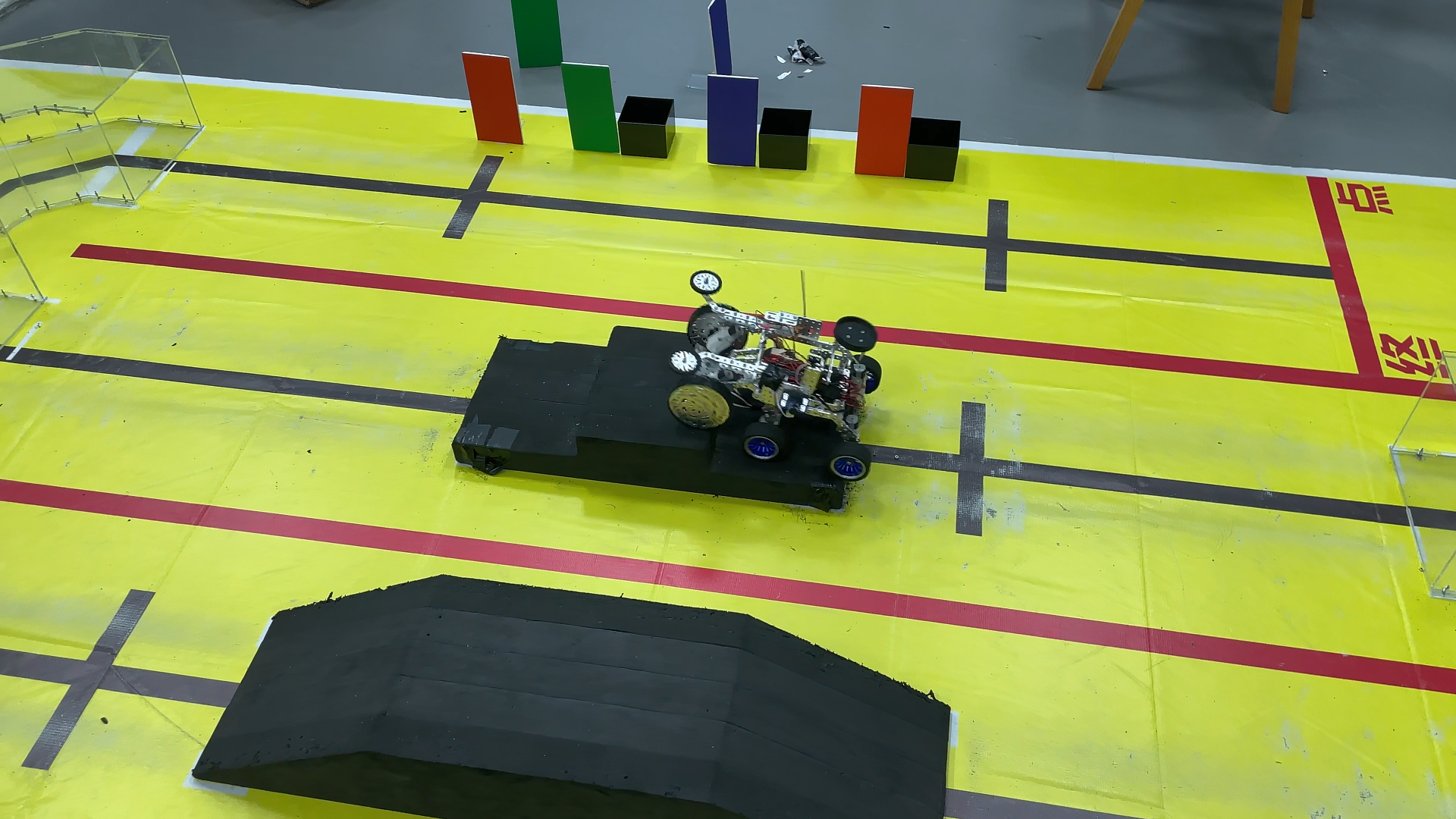
We designed and programmed an all-terrain vehicle in the China Robotics and artificial intelligence competition. The car can drive on different terrains to complete the tasks specified by the organizers. |
|
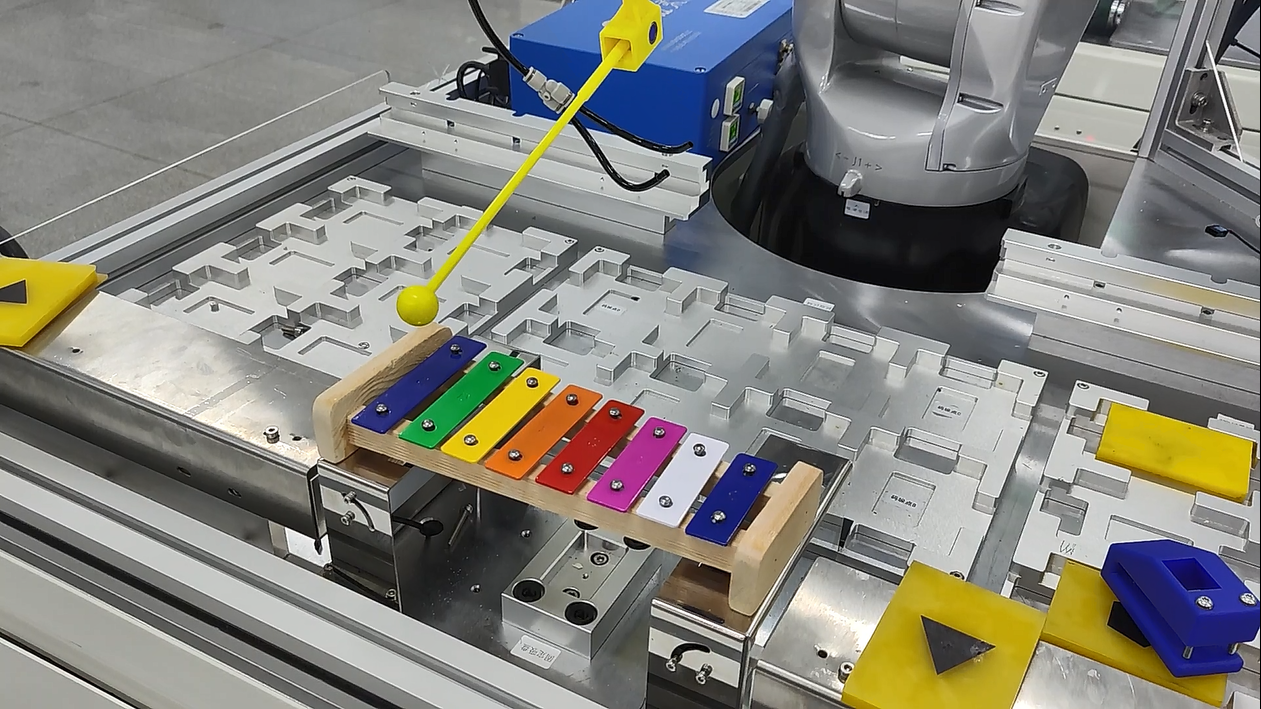
Play the xylophone. Through the motion planning in the Cartesian space of the robotic arm, it is transformed into the joint trajectory in the joint space, and finally the motion control of the robotic arm is realized. |
|
Modified version of template from here. Thanks! Last updated: 23 Dec. 2024 |